Overview
On April 25, 2026, NASA’s Curiosity Mars rover faced an unexpected challenge after drilling into a rock nicknamed Atacama. The 1.5-foot-wide, 6-inch-thick basalt—weighing roughly 28.6 pounds on Earth—refused to let go of the drill bit. When the rover retracted its arm, the entire rock came along for the ride, stuck to the drill. This tutorial walks through the process engineers used to free the rock, based on real mission events. Whether you're a student of planetary science or a robotics hobbyist, understanding these steps reveals how remote operations handle surprises on Mars.
Prerequisites
Equipment and Knowledge
- Mars rover with a percussive drill – e.g., Curiosity’s Powder Acquisition Drill System (PADS).
- Robotic arm with 5 degrees of freedom for positioning.
- Remote operations team – capable of sending delayed commands (latency ~5–20 minutes).
- Scientific instruments – Mast Camera (Mastcam) for imaging, and accelerometers to detect vibrations.
- Basic understanding of rover command sequences – including arm joint movements, drill percussion, and vibration parameters.
Software and Command Environment
- Familiarity with rover command language (e.g., RSVP for sequence planning).
- Knowledge of safety limits: maximum drill force, arm joint torque, and power constraints.
Step-by-Step Instructions
1. Drilling the Sample
The operation begins with selecting a target. Atacama was chosen for its layered appearance. The drill is positioned using arm joint angles: arm.shoulder=45°, arm.elbow=60°, arm.wrist=-30°. Then the percussive drill activates:
cmd_drill_start(depth=5cm, rpm=60, percussion=True, stroke=1mm)
cmd_drill_stop()After drilling, the drill retracts the bit. In normal cases, the sample falls into the CHIMRA (Collection and Handling for In-Situ Martian Rock Analysis). But here, the rock adhered—likely due to static charge or rough grain interlocking.
2. Detecting the Stuck Rock
When the arm moved away from the drilling target, telemetry showed an unexpected load on the wrist joint. The arm’s accelerometer data produced this signature:
[time: t+2s] torque_z: 1.8 Nm (expected 0.2 Nm)
[time: t+5s] attitude offset: +3° (pitch up)Simultaneously, the Mastcam captured an image showing the rock attached to the drill bit. The rock’s mass (13 kg on Mars) exceeded the drill’s retention capability, but friction kept it in place.
3. Attempting to Dislodge the Rock
Engineers had two primary tools: arm repositioning and drill vibration. The sequence began with cautious arm movements to try to snap the rock free:
- Repositioning the arm – Command:
arm.move_joints(shoulder=55°, elbow=70°, wrist=-20°). This increased the torque on the rock’s attachment point. - Vibrating the drill – Using the drill’s percussion mechanism without rotation:
cmd_vibrate_drill(frequency=12Hz, amplitude=1.5mm, duration=30s). This is similar to shaking a stuck component. - Repeating with different angles – Over several sols, the arm was moved through 12 distinct poses, each followed by a 20-second vibration burst.
Critically, the team monitored the power draw. The drill’s vibration motor should stay below 15W to avoid overheating.

4. Successful Detachment
After four days (May 1, 2026), during a final vibration cycle, telemetry showed a sudden drop in load torque from 1.8 Nm to 0.3 Nm. The rock had broken into several pieces. The arm was retracted and the cavity imaged. The remaining fragments on the ground were cataloged.
5. Post-Event Documentation
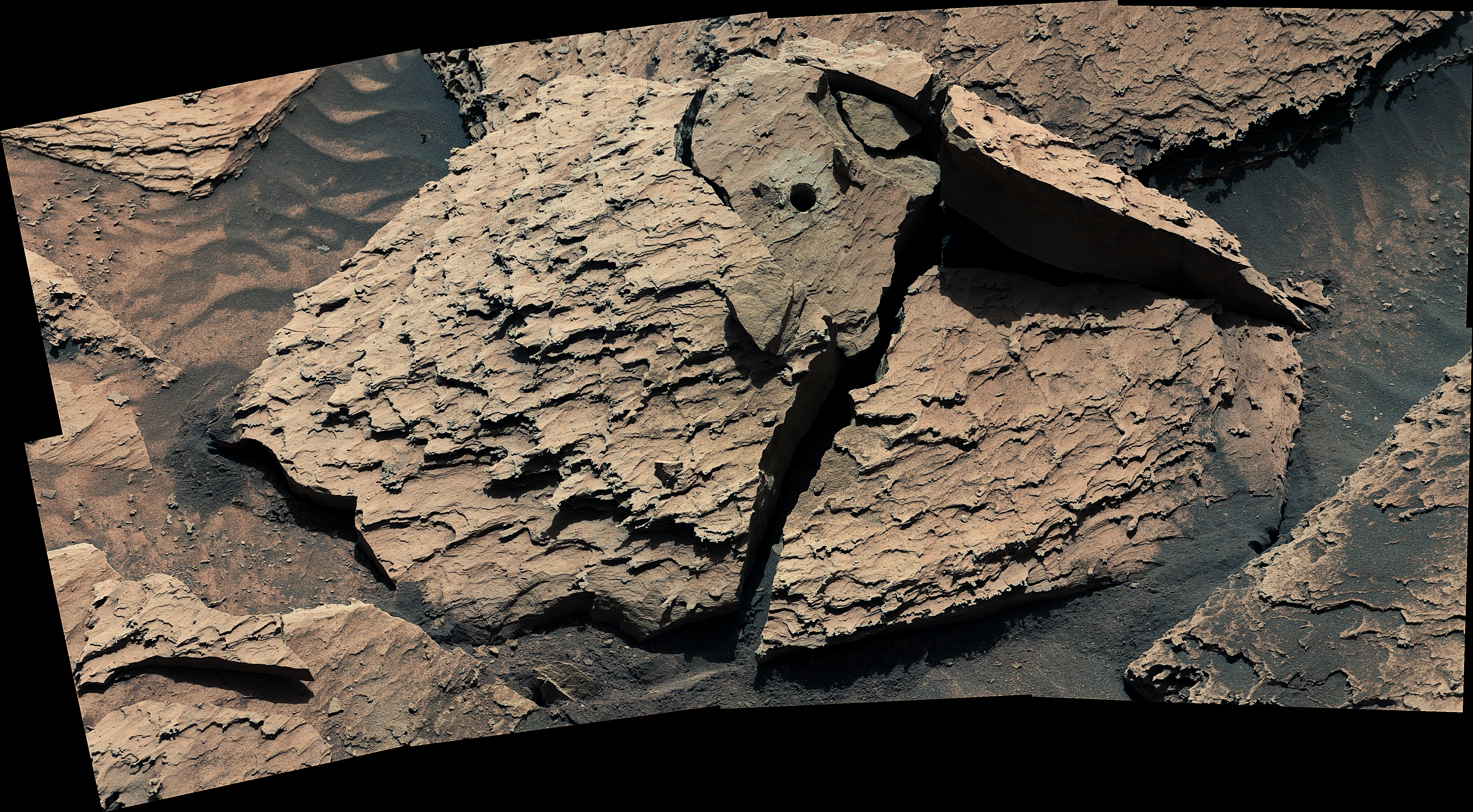
On May 6, the Mastcam performed a close-up scan of the now-free rock (image resolution 0.2 mm/pixel). The drill hole—exactly 1.6 cm in diameter—is clearly visible. This data helps validate the fracture mechanics model.

All telemetry and images were downlinked for engineering analysis. The incident informed future drilling procedures (e.g., increased use of anti-stick coatings).
Common Mistakes
Using Excessive Vibration
Too high amplitude can cause the drill bit to break or the arm joint to exceed safety limits. Stick to recommended parameters: max 2mm amplitude, max 20Hz.
Ignoring Thermal Constraints
Vibration generates heat. On Mars, limited convection means the drill motor can overheat within 60 seconds of continuous use. Always include cool-down periods.
Rapid Arm Movements
Sudden acceleration can detach the rock but may also damage the arm’s harmonic drive. Use smooth moves with acceleration limits: max_accel=0.2 m/s².
Failing to Image After Drilling
Without a post-drill image, you might not see the stuck rock until you move the arm—wasting time and increasing risk. Always schedule a Mastcam shot immediately after retraction.
Summary
Handling a stuck drill sample on a Mars rover requires patience, careful telemetry analysis, and iterative commands. The Curiosity team freed the Atacama rock in 6 days using arm repositioning and controlled vibration. Key takeaways: monitor torque, use moderate vibration, and document every step with high-resolution images. This real-world problem-solution approach keeps rovers productive despite planetary obstinacy.